近期,我院在自动化领域顶级期刊《IEEE Transactions on Intelligent Transportation Systems》上发表题为“Non-Cooperative and Cooperative Driving Strategies at Unsignalized Intersections: a Robust Differential Game Approach”(无信号交叉口的非合作和合作驾驶策略:一种鲁棒微分博弈方法)的学术论文,该论文第一作者为黄捷教授,陈宇韬副教授为本文通讯作者。IEEE Transactions on Intelligent Transportation Systems是美国电气和电子工程师协会(IEEE)智能交通分会的旗舰期刊,是智能交通和自动驾驶领域国际顶级期刊,中国科学院一区TOP期刊,重点收录应用于交通系统的信息技术设计、计算、处理、分析和控制等创新研究成果。

项目背景:
车辆在通过无信号灯交叉路口时效率很低,且极易发生事故,解决无信号灯交叉路口各交通参与者之间的冲突,具有重要意义。智能车辆可以通过车-车通讯,实现协同通过无信号灯交叉路口,但易受通讯干扰影响,导致通过效率变低,甚至造成安全事故。因此,有必要研究通讯干扰下的智能车辆协同通过无信号灯交叉路口的控制方法。
成果介绍:
我院课题组提出了一种鲁棒分布式微分博弈模型,通过考虑多个车辆之间的相互协作,提高了通信干扰下车辆通过非信号灯交叉路口的效率,降低了碰撞风险。论文同时考虑了合作和非合作微分博弈模型,其中受控车辆在非合作博弈中优化其自身成本,而在合作博弈中与其他车辆协调其策略以优化联合成本。论文证明了由单个优化问题定义的每个智能车辆的局部最优策略在非合作博弈中收敛到全局鲁棒纳什均衡,在合作博弈中则收敛到全局鲁棒帕累托纳什均衡。
研究成果中的核心观点如下:
第一,通过考虑最坏情况下的信号扰动,建立了非合作和合作的鲁棒微分博弈模型。论文严格证明了强联通拓扑假设下,每个车辆的局部最优策略在非合作博弈中收敛到全局鲁棒纳什均衡,在合作博弈中则收敛到全局帕累托-纳什均衡。
第二,将变道问题重新表述为优化变道时间的最优控制问题,因此车辆可以在任意时间变道,提高了车辆行驶自由度,对比使用分解和枚举的方法提高了交叉路口通行效率。
第三,论文采用分布式博弈方法,对比传统集中式博弈方法具有更好的扩展性。

图1 仿真场景图
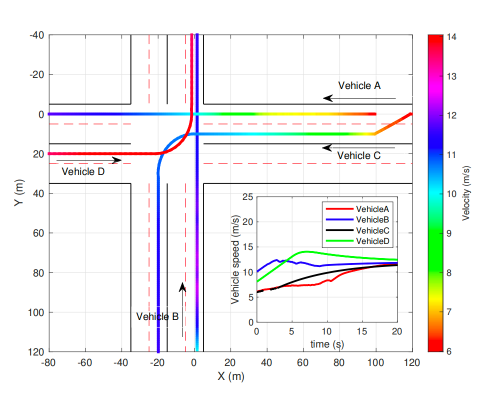
图2 仿真场景结果
综上所述,本文提出了一种鲁棒微分博弈方法来研究多辆智能车辆通过无信号交叉口的驾驶策略。考虑到强连通拓扑中的通信干扰,该方法建立了车辆之间的非合作和合作博弈。建立了存在扰动时的纳什均衡。此外,还提出了一种考虑任意变道时间的变道分解策略。所提出的方法在两个场景和四个典型案例的仿真中得到了验证。结果表明,该方法在保证安全的同时,在通过时间上提高了交通效率。
作者简介:

黄捷,福州大学电气工程与自动化学院教授、博导,福建省自动化学会副会长、福州大学5G+工业互联网研究院院长、福建省闽江学者奖励计划特聘教授、福建省高校杰出青年科研人才、闽江科学传播学者、福州市科创走廊首席科技创新顾问。获首届IEEE/CAA JAS Norbert Wiener Review Award(2017)、SCIENCE CHINA Information Science (SCIS) Five-Year High-Impact Paper Award(2021)、挑战杯国赛“揭榜挂帅”特等奖(2023)等。主要研究方向为:群体智能与无人系统、人机混合增强智能、工业互联网、数字经济等。
陈宇韬,福州大学电气工程与自动化学院副教授、硕导,福州大学5G+工业互联网研究院智能研究所所长,福州大学旗山学者(海外项目)。主要研究方向为:智能交通系统决策与控制,人机混合增强智能,模型预测控制等。

吴智鸿,福州大学电气工程与自动化学院、福州大学5G+工业互联网研究院硕士研究生。主要研究方向为:博弈论和智能交通系统。

