近期,我院刘尚坤老师在中科院二区Top期刊《IEEE Transactions on Aerospace and Electronic Systems》上发表题为Adaptive Fractional-Order Fault-Tolerant Coordinated Tracking Control of Heterogeneous Multiagent Systems Against Multiple Faults Under Deception Attacks(故障和欺骗攻击下的异构多智能体系统自适应分数阶协同容错跟踪控制)的学术论文,黄捷教授为本文通讯作者。
研究背景:
由于无人机和无人车等无人系统具有不同的有效载荷携带能力、侦查范围和通行能力,将它们组成异构多智能体系统进行协同作业可以取长补短,完成更加复杂多变的任务。异构多智能体系统在执行任务的过程中,可能会受到故障和网络攻击的影响,因此有必要研究故障和攻击下的异构多智能体系统的协同容错控制。
成果介绍:
本文对存在故障和欺骗攻击的由多无人机和多无人车组成的异构多智能体系统,提出具有预设性能的自适应分数阶协同容错控制方案,实现了异构多智能体系统的跟踪控制。
核心观点:
1)本文考虑故障发生时系统的暂态性能,因此引入了预设性能函数,针对存在故障和攻击的异构多智能体系统,提出了具有预设性能的自适应分数阶协同容错控制方案。
2) 本文引入考虑攻击增益的坐标变换,所提出的控制方案利用折衷状态来稳定被攻击系统,从而实现对异构多智能体系统的跟踪控制。
3)本文引入分数阶控制算法,相比于整数阶控制方案,分数阶可以引入额外的参数调节自由度,可以提高控制性能。
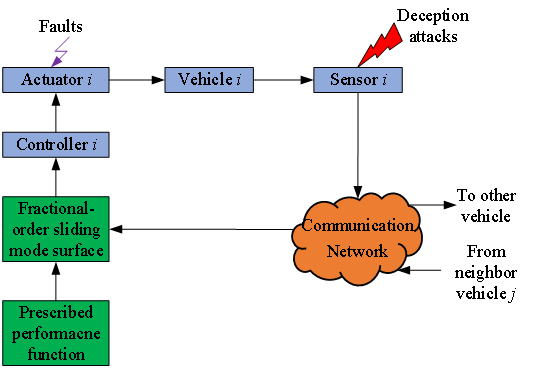
图1 分数阶协同容错控制方案框图
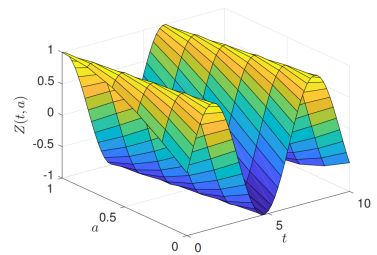
图2 不同阶导数的曲面表示
作者简介:

刘尚坤,福州大学5G+工业互联网研究院智能制造研究所副所长,福州大学电气工程与自动化学院讲师、硕导。主要研究方向为:多智能体系统协同容错控制、智能制造优化调度等。

黄捷,福州大学电气工程与自动化学院教授、博导,福建省自动化学会副会长、福州大学5G+工业互联网研究院院长、福建省闽江学者奖励计划特聘教授、福建省高校杰出青年科研人才、闽江科学传播学者、福州市科创走廊首席科技创新顾问。主要研究方向为:群体智能与无人系统、人机混合增强智能、工业互联网、数字经济等。

