近期,我院在《Unmanned Systems》国际知名无人系统期刊发表《Model Predictive Control for Small Spacecraft Rendezvous with Non-cooperative Maneuvering Targets》学术论文,第一作者及通讯作者为黄捷教授。
研究背景
随着低地球轨道小型航天器任务的快速增长,以星链为代表的小型航天器在在轨服务、编队飞行等领域展现出巨大潜力。然而,小型航天器面临着推进能力有限、计算资源受限、传感器精度不足等独特挑战。特别是在与非合作目标进行交会时,任务环境更为严峻:目标不仅缺乏合作信标、动力学模型未知,还可能实施意外机动。此外,电推进系统的逐步应用使得目标可能进行持续低推力机动,进一步增加了跟踪和接近操作的复杂性。因此,当前亟需发展一种集成控制技术:能够实现从远程轨道机动和近程精确交会一体化控制,并有效应对目标未知机动行为。
成果介绍
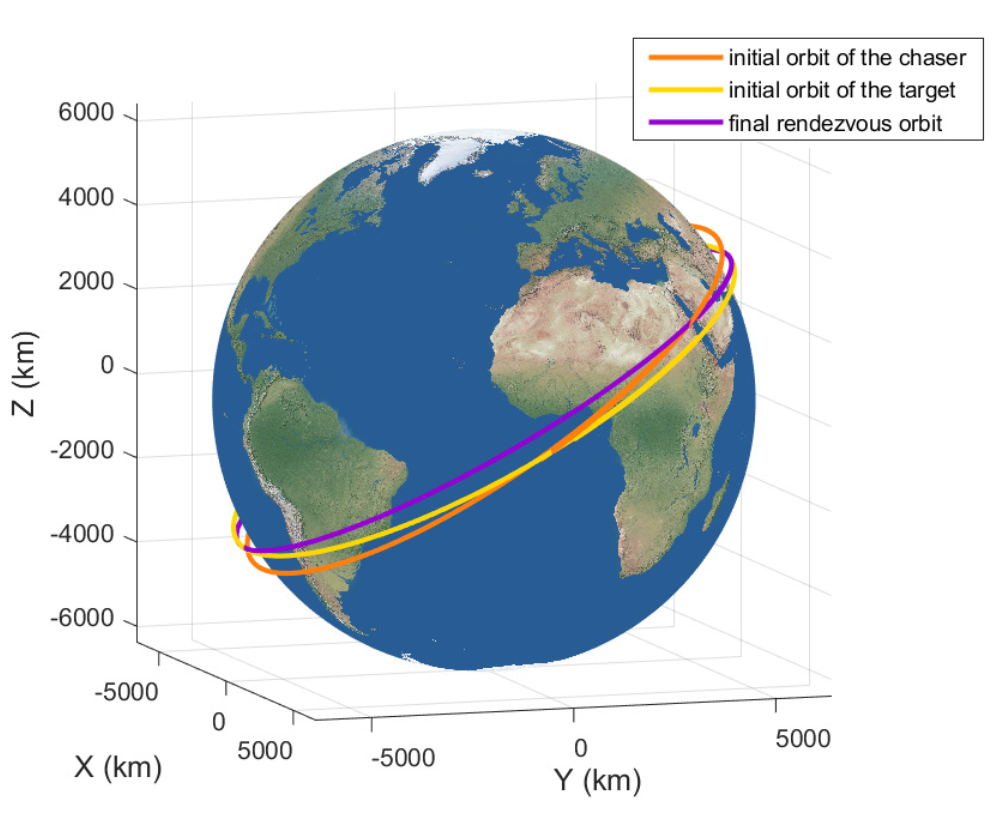
本文以3U CubeSat为仿真平台,在所设定的任务场景中,追踪航天器与目标航天器初始相距925公里,分别运行于倾角为34.6°和29.8°的近地圆轨道上。仿真结果如下:
(1)在远程轨道机动阶段,控制器在40mN的推力约束下,成功引导CubeSat在23.6小时内完成轨道转移,将相对距离从925公里缩短至1公里以内,并同步实现4.8deg的轨道倾角调整;
(2)在近程交会阶段,当目标以10mm/s²的加速度实施机动时,UMVISE滤波器可在2秒内检测到机动启动,并将位置跟踪误差控制在5厘米以内;
(3)在目标非机动期间,位置误差进一步降至2厘米,最终实现了厘米级精度的自主交会。本研究为小型航天器执行复杂交会任务提供了可行的技术途径,对今后在轨服务、空间碎片清除等应用具有参考价值。
核心观点
(1)开发了适用于小型航天器的低推力远程轨道机动框架,成功实现了初始距离超过900公里的轨道转移任务;
(2)提出了一种融合远程轨道机动和近程交会的两阶段模型预测控制架构,通过智能调整控制频率和代价函数权重,实现了阶段间的无缝切换;
(3)首次将无偏最小方差输入和状态估计方法与模型预测控制方法相结合,应用于航天器控制系统,实现了对非合作目标未知机动的实时检测与控制补偿。
作者简介

黄捷,福州大学电气工程与自动化学院教授、博导,福建省自动化学会副会长、福州大学5G+工业互联网研究院院长、福建省闽江学者奖励计划特聘教授、福建省高校杰出青年科研人才、闽江科学传播学者、福州市科创走廊首席科技创新顾问。主要研究方向为:群体智能与无人系统、人机混合增强智能、工业互联网、战略新兴产业规划等。

朱辽,福州大学电气工程与自动化学院、福州大学5G+工业互联网研究院硕士研究生。主要研究方向为:航天器控制方法。

